
 where
where  is the angular momentum of the system about the centre of mass with velocities considered with respect to the centre of mass. Note
is the angular momentum of the system about the centre of mass with velocities considered with respect to the centre of mass. Note  , rest of the notation is the standard notation used in the lesson. Note L’ and MR
, rest of the notation is the standard notation used in the lesson. Note L’ and MR  can be said to be angular momenta, respectively, about and of the centre of mass of the system of particles.
can be said to be angular momenta, respectively, about and of the centre of mass of the system of particles. Further prove that:
Further prove that:  Where t’ext is the sum of all external torques acting on the system about the centre of mass. (Clue : A pply Newton’s Third Law and the definition of centre of mass. Consider that internal forces between any two particles act along the line connecting the particles.)
Where t’ext is the sum of all external torques acting on the system about the centre of mass. (Clue : A pply Newton’s Third Law and the definition of centre of mass. Consider that internal forces between any two particles act along the line connecting the particles.)Here 
(1)
also, 
(2)
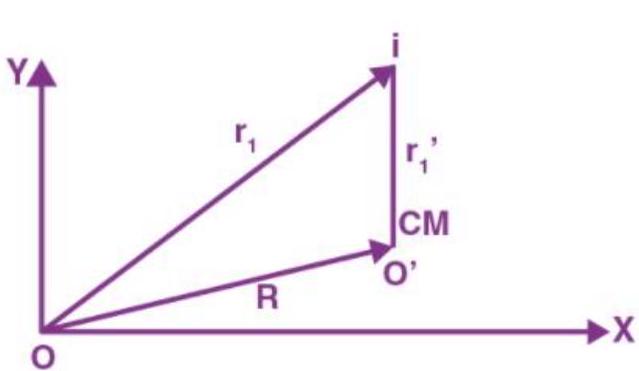
Where  and
and  denote the radius vector and velocity of the
denote the radius vector and velocity of the  particle refers to the new origin as the centre of mass
particle refers to the new origin as the centre of mass  ‘, and
‘, and  is the velocity of the centre of mass with respect to
is the velocity of the centre of mass with respect to  .
.
(i) Total angular momentum of the system of particles is calculated below:






According to the definition of centre of mass, we can write,

Such that, 
Given, 
Thus, we have ; 
(ii) From previous solution, we have



Total torque can be calculated as,



Where,  is the net torque about the centre of mass as origin and
is the net torque about the centre of mass as origin and  is about the origin .
is about the origin .



As a result, we have, 